1. Introduction and Goal Setting
The development of the prototype was guided by a rigorous approach, where the establishment and fulfilment of specific target parameters, defined by the Vehicle Dynamics department, were crucial from the outset.
Initially, the primary focus was on the robustness and functionality of the design, which led to the decision not to impose a strict weight limit on other departments in the first phase of the project. Initial concepts for basic dynamics calculations (power, force, stresses, etc.) were established to support this approach.
2. Kinematics
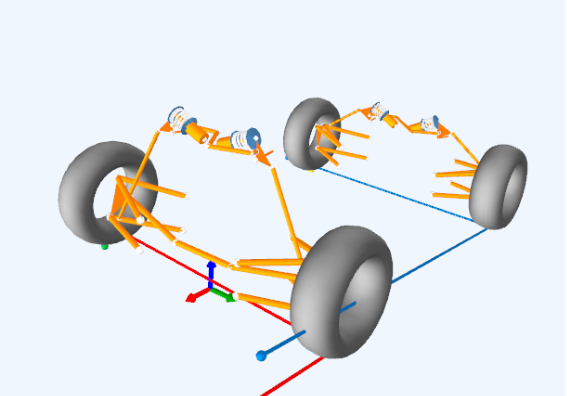
The suspension kinematics were developed using Optimum Kinematics. The process began with the definition of the outboard and inboard points for the geometry of the suspension arms (A-arms).
By dynamically altering toe and camber angles, they either work to generate a more optimal slip angle, which enables more lateral force or maximize contact area through camber angle variation.
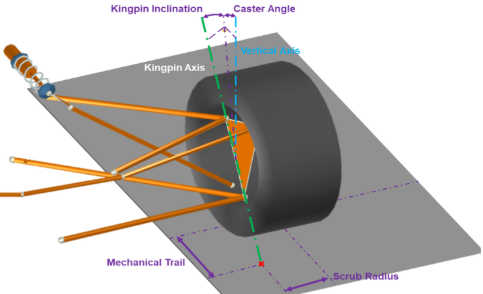
Caster Angle
Caster angle is the forward or backward tilt of the steering axis, viewed from the side of the vehicle. This is extremely important for straight-line stability and self-centering steering.
Mechanical Trail
Mechanical Trail directly related to the Caster Angle is the distance from the point where the steering axis meets the ground to where the vertical line in the middle of the tire meets the ground, in the lateral plane where the steering axis lateral angle is the Caster Angle.
Camber Gain
Camber gain works with the compression of the suspension or the body roll, where the top of the tire tilts inwards, creating more negative camber. This is useful to maintain the maximum contact patch possible during cornering, in order to maximize grip.
King Pin Angle
King Pin Angle (KPI) is a fundamental measurement in vehicle suspension geometry. It represents the angle between the wheel’s steering axis and the vertical line when viewed from the front of the vehicle.
This angle was importance in:
– Stability in a straight line.
– It acts as a caster regulator, since in turning, the caster causes us to gain positive camber, so the KPI can reduce this positive camber gain throughout the curve.
-It creates the effect of the steering wheel returning to the center in a straight line.
Scrub Radius
Scrub Radius directly related to the KPI is the distance from the point where the steering axis meets the ground to where the vertical line in the middle of the tire meets the ground, in the frontal plane where the steering axis frontal angle is the KPI.
Bump Steer
Bump steer is when, due to movements in the suspension, the vehicle’s wheels steer by themselves. This is an unwanted side-effect of having mismatched arcs between the steering arm and the a-arms.
Roll Steer
Roll steer is the unwanted change in wheel toe angle, when the vehicle body rolls during cornering or over bumps, making the car harder to control.
Ackermann
Ackermann geometry serves to allow the steering system to accommodate the front tires in steering around different radii and generate optimal slip angles.
Motion Ratio
Motion Ratio is the relationship between how much the wheel moves and how much the shock absorber moves.
Roll stiffness
Roll stiffness is a vehicle’s resistance to leaning sideways during a turn. The total roll stiffness is the combination of the value for the shock absorbers and anti-roll bar.
Instant Centre
Instant Center is an imaginary point around which a wheel’s suspension rotates at a given moment of movement. It is found by drawing imaginary lines through the a-arms until they intersect. This point is not fixed; it moves as the suspension and rebounds. The location of the Instant Center is crucial because it determines how cornering forces are transferred to the chassis and directly influences other important suspension characteristics, such as camber gain and roll center.
2.1. Geometric Definition
The geometric parameters for the outboard points were defined as follows:
| View | Defined Parameters | Analysis |
| Front | (King Pin Angle), (Scrub Radius) | Optimization of steering response and driver feedback |
| Lateral | (Caster Angle), (Mechanical Trail) | Optimization of directional stability and self-alignment. |
The inboard points were determined based on the Instant Centre. Subsequently, the Ackermann geometry was analysed, aiming for parallel geometry.
2.2. Motion and Stiffness Analysis
The kinematic analysis included the evaluation of camber gain and the variation of kinematic values throughout the suspension travel, as well as bump steer and positive caster.
The motion ratio was calculated with the aim of minimizing its variation with suspension movement according to:
| Quantity | Effect | Description |
| Positive Caster | Dynamic camber change | As you turn the steering wheel, it adds negative camber to the outer wheel when you make a turn. |
| Camber Gain | Dynamic camber change | Adds camber to an axle during compression and rebound |
| Bump Steer | Dynamic toe change | Adds toe to an axle during compression and rebound |
| Ackermann Geometry | Manipulation of steering angles between wheels | It is the percentage that the inner wheels, compared to the outer wheels, travel separate radii in a given manoeuvre due to their distance from the centre of the curve. |
Determining ride height and roll stiffness, which are intrinsically linked parameters, is important because when ride height increases, roll stiffness also increases. This is because when ride height increases, the height of the centre of mass also increases, and when cornering, as rolling forces are applied, the car is more prone to roll.
How is the ride height calculated? In addition to the minimum height of 30 mm established in the Formula Student regulations, the value itself can be calculated using an aero map that lists the lift for various car heights, thus choosing the car height that works better with our objectives.